全國服務咨詢熱線:
15216837090
15216837090

1、概述
近些年來,隨著科學技術的不斷進步和發展,智能化在人們的生活中越來越普遍,在當前的雨刮設計中,也有智能化技術的應用,可以說,利用智能化技術設計的雨刮器與傳統的雨刮器存在很大的區別,在雨刮器的處理器設計、機電驅動設計等方面都有了很大的改變。除此之外,運用智能化技術設計的雨刮器的系統運行性能也有了很大的提升,因此,本文將結合新型汽車雨刮的上述特點,對其設計進行簡要的介紹,以期為今后的相關工作提供一定的參考。
2 汽車雨刮的機構組成及材料工藝
汽車的雨刮主要由機構、刮桿和刮片三部分組成,其中還包含有直流電動機、四連桿機構、刮水片和減速器等十多個小部件組成。雨刮器的工作原理為:當按下雨刮器的開關時,電動機即啟動,其轉速會帶動蝸輪蝸桿轉動,渦輪蝸桿具有一定的減速增扭作用,在這種作用力的帶動下會驅動擺臂進行運動,從而帶動四連桿機構運動,再由四連桿機構帶動安裝于車前身圍板上的轉軸進行左右方向的擺動,zui后由轉軸的擺動帶動雨刮片進行左右往復擺動,使其進行刮掃擋風玻璃的運動。
雨刮主要包括直流電機和連桿機構兩個組成部分,圖1所示即為直流電機和連桿機構的組成部件,其中,直流電機主要包括電動機、電機輸出軸和蝸桿蝸輪等部分,其制作材料一般會選用特種鋼材料,并對其表面進行特殊處理后,才會用于制作電機;連桿機構的組成主要包括轉軸、連桿、搖臂、固定管和固定板等部件,其制作材料通常為熱鍍鋅板和髙強鋼。
如圖2 所示為雨刮器的刮桿部分,其主要由刮桿、臂板、彈簧、C-Bow、臂座等幾部分組成,其中,雨刮器的臂板大多是釆用冷軋板制成,而臂座的制作材料通常為壓鑄鋁。
圖3 所示為雨刮器的刮片部分,主要組成部分有簧片、端蓋、膠條、接頭、風翼和連接卡頭等,其中,在進行雨刮簧片制作時需要為其制作防鎊層;在進行材料選擇時,連接卡頭和端蓋適合選用具有較髙的耐摩擦性能的材料,在現代的制作工藝中,通常會選用熱塑性工程塑料進行制作,因為這種工程塑料具有較髙的結晶度和較高的密度,能夠有效的增加連接卡頭和端蓋的耐摩擦性;而雨刮通常會選用注塑件,因為其具有髙強度和髙耐疲勞度;在進行膠條材料選擇時,通常會偏向于選用的橡膠材料,并對其表面的石墨涂層進行一定的鹵化處理。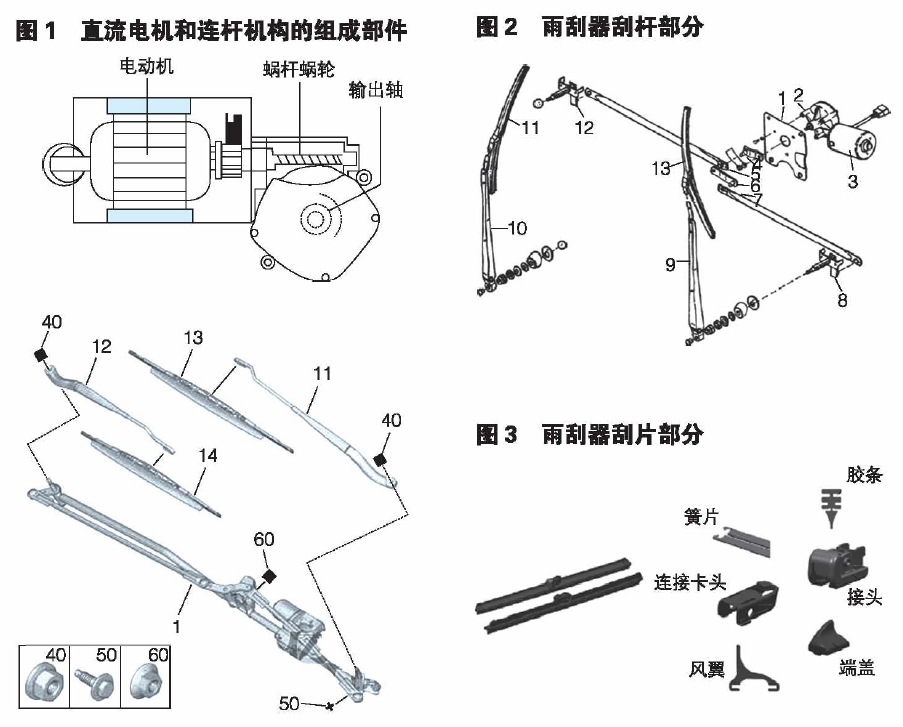
3、傳統汽車雨刮特點與弊端
就我國目前的汽車雨刮刮刷方式而言,總共有4種刮刷方式,分別為同向刮刷、對刮、單臂可控刮刷和普通單臂刮刷。前兩種刮刷方式還可以根據電機數目的不同,分為單電機驅動和雙電機驅動兩種。在上述多種刮刷方式中,具備伺服功能的雙電機對刮模式可以說是當前較為先進的刮刷方式。
傳統的雨刮器有如下的特點:
1. 雨刮采用對刮和同向刮刷的方式進行布置,這就使得刮刷面積増大了10%,從而有效的減少了刮刷盲區。
2. 雨刮片較為符合空氣動力學特性。在使用后,關閉雨刮器的狀態下,雨刮可以*的收進雨刮槽內,從而有效的減少了空氣阻力。
3. 在車輛高速行駛的狀態下,雨刮片的空氣動力學部件的下壓力會更強,從而有效的避免了下壓力不足而導致的刮刷不凈現象的產生。
4、新型智能汽車雨刮系統的設計分析
4 . 1 處理器設計
在新型的智能汽車雨刮系統中,處理器可以說是其中zui為重要的組成部分,有著十分重要的地位。在整個雨刮系統中,處理器主要發揮著處理雨刮轉速、控制電機轉速信號、處理雨量信號等信號的作用,處于整個系統的核心地位,因此,在新型智能雨刮的設計中,處理器的硬件配置就有了更髙的要求。在新型智能雨刮系統的設計中,想要滿足以上控制功能,處理器就要有更高精度的模擬水平,與此同時,處理器還需要具備髙性能數字信號處理的能力。本文中介紹的搭載DSP芯片的處理器,是一款代碼兼容的高性能數字混合處理器,它不僅可以對各種外部信號進行很好的處理,還能夠有效地提升智能汽車雨刮系統的運行效率。
4 . 2 電機驅動設計
現在使用zui為普遍的電機驅動主要是車載的電機,這類電機可以為汽車的雨刮系統提供其所需要的電流,從而可以zui大程度上保證系統的正常運行。在對電機驅動設計的過程中,需要釆用的車載電機驅動芯片才能夠在zui大程度上保證該電機驅動為系統提供的zui大驅動電流可以達到30A, 與此同時,電機驅動的內部集成了電流感應模塊和H 橋電機驅動電路。這樣的設計可以有效的保證整個雨刮系統運行的正常性,也在一定程度上滿足了智能雨刮電機驅動的運行要求,除此之外,電機驅動還具備一定的智能保護功能,可以實現對電機運行狀態的實時檢測,一旦電機出現異常情況,就可以及時的釆取應對措施,充分的保證了電機以及雨刮系統運行的安全性和可靠性。
4 . 3 其他設計
除上述的處理器和電機驅動外,智能汽車雨刮系統還包括很多硬件設備,比如光電編碼器、CAN總線結構、DSP外圍電路和JTAG仿真接口等,上述的各種硬件設備都對新型智能汽車雨刮系統的正常運行起到了一定的輔助和支撐作用,可以說,在新型智能汽車的整個雨刮系統設計的過程中,要充分的考慮到其設計的全面性。在雨刮系統中起到重要作用的光電編碼器,主要的功能是用于電機角度信號的返回,這樣就有效的實現了對雨刮的刮刷角度和電機轉速的監測和測量,在保障汽車雨刮系統運行性能和運行可靠性方面有著重要的作用,是新型智能汽車雨刮系統的重要組成部分。
5、測試與仿真
5 . 1 測試
對新型智能汽車的單片機PWM輸出波形進行分析,如圖4所示即為單片機的PWM輸出波形,其主要的信號參數包括周期和脈寬兩方面,其中T1為脈寬,T1+T2為周期,可以通過調節PWM信號的占空比來實現兩個雨刮的同步擺動。
5 . 2 仿真
使用simuilkn軟件包對雨刮系統進行仿真,仿真結果如圖5所示,從圖5的數據和曲線中可以看出,自調整模糊控制響應曲線的調整時間是.05s, 超調量是2% ,PID響應曲線的調整時間是1.55,超調量是21%;與PID控制器相比較, 自調整模糊控制器具有調節速度快,超調量小,控制精度高等特點。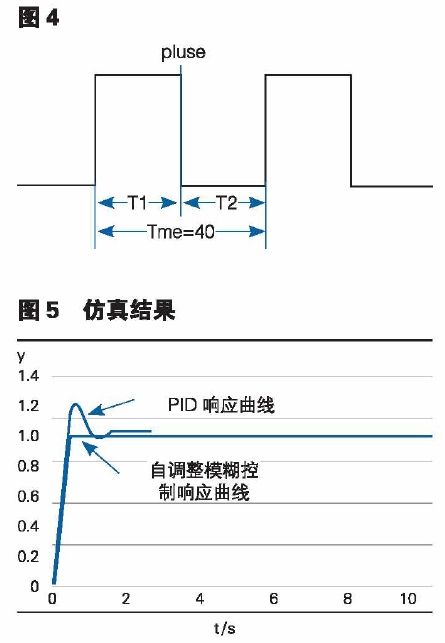
綜上所述可以看出,在科學技術飛速發展的當下,新型智能汽車雨刮的設計和開發已經逐漸的成為了發展的熱潮,在傳統雨刮開發和利用的基礎上,結合現代先進的科學技術制造的智能雨刮更具有使用的*性和先進性,在實際的使用中更能發揮其優勢,相信在不久的將來,新型智能雨刮將會有一片光明的發展前景。
電話
微信掃一掃

 當前位置:
當前位置: